Código Global: 233-SL293D
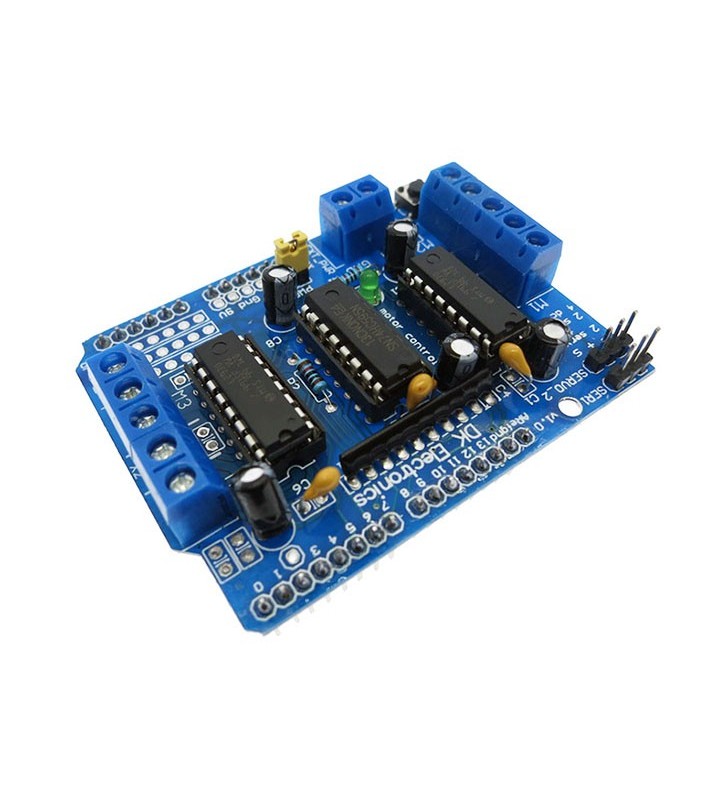
SHIELD ARDUINO MEGA2560 PARA CONTROLAR MOTORES BASADA EN 2 L293D (PUEDE MANEJAR 4 CARGAS INDUCTIVAS DE 0.6A POR CANAL), Forma: SL293D
Fabricante: DK
El conversor expande 3 pines de Arduino a 8 pines necesarios para manejar la dirección de los drivers. Las señales "Enable" de los drivers están conectadas directamente a pines PWM de Arduino, permitiendo controlar la velocidad de los motores.
El Shield soporta:
Características:
No customer reviews for the moment.
REGULADOR DE VELOCIDAD PWM PARA MOTOR DC CON SWITCH REVERSION DE GIRO, VOLTAJE DE ALIMENTACION 10-30VDC, CTE. MAX. 4A, RANGO PWM 5%-95%, Forma: PWM01
MODULO DRIVER MOTOR PASO A PASO, SEIS MICRO RESOLUCIONES DE PASO HASTA 1/32, 45V Y 2.2A MAX CON DISIPADOR, PIN A PIN COMPATIBLE CON DRV A4988 PERO MAYOR RENDIMIENTO, Forma: DRV8825
REGULADOR DE VELOCIDAD PWM PARA MOTOR DC, VOLTAJE DE ALIMENTACION 6-60VDC, CTE. MAX. 30A, 20A NOMINAL, RANGO PWM 0%-100%, PARTIDA Y PARADA SUAVE PROGRAMABLE, Forma: PWM02
MODULO CONTROL DE MOTORES SIN ESCOBILLA, PLACA CONTROLADORA BLDC HALL, 12-36V 15A 500W
DRIVER PARA MOTORES PASO A PASO, FULL STEP, 1/2, 1/4, 1/8 Y 1/16 STEP. CAPACIDAD SALIDA 35V +/-2A, Forma: A4988DRV









